Главная :: Акустика:: Выбор динамика для TQWP и ОЯ просто... очень сложно.2006-07-08
Наша жизнь полна компромиссов. Если хочешь чего-то добиться - всегда нужно с чем-то мириться. Если любишь девушку и хочешь на ней жениться - помни о теще. Так во всем. И в радиолюбительстве тоже. При выборе концепции построения акустической системы для дома, тоже приходится с чем-то смиряться, чтобы достигнуть приемлемого результата. Все мы хотим сделать акустические системы маленького размера, чтобы отлично звучали и мало стоили. К сожалению, удовлетворить всем этим желаниям практически невозможно. Если конечно качество МР3 через наушники удовлетворяет - то это счастье, так как оно достижимо в пределах 1500 рублей за классные кАлонки. Вернувшись к воспроизведению музыки на аппаратуре класса High Fidelity (высокая точность), можно с уверенностью сказать, что все не так далеко ушло за последние 50 лет. Принципы, заложенные почти 90 лет назад и поныне являются основой современных разработок и ничего принципиально нового или принципиально лучшего изобретено не было. Если из формулы счастья (маленькие хорошие дешевые) убрать один из компонентов и ослабить еще один, то просторов для полета мысли и молотка становится гораздо больше. Идеальным с точки зрения физических аспектов распространения звуковой волны является однополосный точечный излучатель. Широкополосные громкоговорители разработаны очень давно, но остаются популярными и по сей день. Безусловно, широкополосный динамик это куча компромиссов, но послушавшие хоть раз хорошую систему на широкополосном динамике, никогда не забудут тот звуковой образ. Вот вопросам недорогой АС на широкополосном динамике и будет уделено внимание в данном проекте.
Самые первые Акустические системы были нагружены на экран, который изолировал излучение от передней и тыльной стороны головки громкоговорителя и предотвращал образование Акустического Короткого Замыкания. Эти системы имели частоту основного резонанса около 100герц, сильно искажали сигнал на больших уровнях и естественно, габариты таких экранов редко вписывались в типовые квартиры даже иностранных аудиофилов. Как только удалось запихать динамик в небольшой ящик и снизить нижнюю граничную частоту до 45-60герц, о экране и о динамиках для Free Air установок без компрессии воздуха в ящике забыли. Но именно звучание АС в Открытом оформлении изумляет и сегодня слушателей этих редких и громоздких систем. В современной литературе, после опубликования трудов Тиля и Смолла о поведении динамических головок на частотах, близких к резонансным, описание динамиков для ОЯ отсутствует напрочь. В наши дни, считается, что для расчета корпуса АС достаточно знать значение полной добротности системы, резонансную частоту и эквивалентный объем динамика. Все крутится около параметра энергетического потенциала системы FS/Qts и деление происходит между Закрытым Ящиком и ФазоИнверторным оформлением (ЗЯ с дополнительным излучателем в виде резонатора Гельмгольца). Так какие же динамики можно ставить в экран и открытые оформления. И что скрывается за скупыми параметрами Тиля-Смолла. Как работают динамики не на резонансной частоте - вот тайна, скрытая во мраке. Вернее не во мраке - а в глубине развернутых таблиц параметров электродинамического преобразователя. Для этого придется вспомнить теорию работы электродинамических громкоговорителей и некоторые параметры их работы, разберемся по понятиям.
Далее идет описание азов работы электродинамических преобразователей и слабонервных или тех, кто уверен, что знает всё - просьба не смеяться.
Электродинамическая головка прямого излучения :
1-кольцевой магнит; 2-верхний фланец; 3-нижний фланец; 4-керн; 5-звуковая катушка; 6-диффузор; 7-диффузородержатель; 8-центрирующая шайба; 9-верхнее гофрированное кольцо.
Головка состоит из двух систем магнитной и подвижной механической. Магнитная система состоит из кольцевого магнита 1, верхнего 2 и нижнего 3 фланцев и центрального стержня 4, называемого керном.
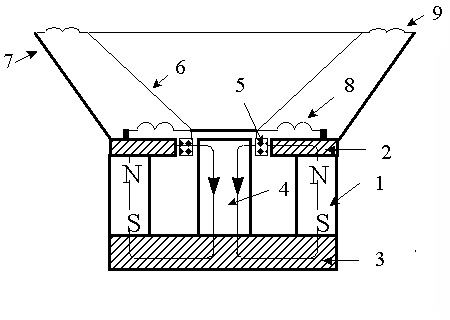 |
Фланцы и керн представляют собой Магнитную систему. В некоторых конструкциях используют керновой магнит 4, тогда кольцо 1 является частью магнитопровода. Магнитная система в сочетании с катушкой по западной терминологии называется мотором. Верхний фланец имеет отверстие, в которое входит верхняя часть керна. Диаметр отверстия подобран так, чтобы между внутренней поверхностью отверстия и верхней частью керна образовался кольцевой зазор, в который помещают намотанную на каркас звуковую катушку 5, свободно колеблющуюся в нем в осевом направлении. |
Каркас звуковой катушки приклеивается к нижней части диффузора. Сам диффузор обычно отливается из специальной бумажной массы. Для придания ему жесткости форма диффузора выбирается в виде усеченного конуса с круговым или эллиптическим основанием, что позволяет считать его вплоть до достаточно высоких частот жестким поршнем. Диффузор подвешен вверху к диффузородержателю 7 с помощью верхнего гибкого гофрированного кольца 9 и внизу к верхнему фланцу с помощью центрирующей шайбы 8. Элементы подвеса должны допускать свободное перемещение диффузора только в осевом направлении и противодействовать радиальному смещению звуковой катушки.
Из показанного на рисунке хода магнитных силовых линий видно, что в воздушном кольцевом зазоре катушка находится в радиальном магнитном поле. При пропускании по катушке тока на проводник действует электродинамическая сила, равная по закону Био-Савара F=BlI, где В-индукция в зазоре; l-длина провода звуковой катушки. Эта сила приводит в движение катушку, а вместе с ней и диффузор.
Эта структура динамических головок неизменна вот уже более 80 лет. Электродинамическая сила F прикладывается к массе подвижной системы, которая состоит из массы диффузора, звуковой катушки, соколеблющихся масс верхнего гофрированного кольца и центрирующей шайбы и соколеблющейся массы динамически присоединенного воздуха. Масса системы движется вдоль оси головки, будучи подвешенной на этих двух гофрированных кольцах, которые представляют собой гибкость, которая и определяет величину возвращающей упругой силы. Вот величина этой силы в открытом оформлении и определяет как быстро эта пружина вернет подвижную систему в нулевое положение. В параметрах динамических головок, описанных Тилем и Смоллом, данная пружина определена как Сms и определяет на сколько переместится пружина при приложении к ней усилия в один ньютон. Но любая пружина имеет период установления в состояние покоя и процесс этот апериодический затянутый во времени и чтобы ускорить процесс установления в состояние покоя и сократить переходные процессы в подвижной системе, эта пружина дополнительно демпфируется - амортизируется.
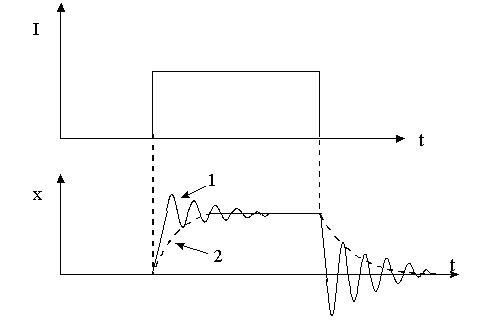
На рисунке показан переходный процесс в подвижной системе головки при подаче на катушку прямоугольного импульса постоянного тока: 1-колебательный режим; 2-апериодический режим; х-смещение подвижной системы. От показателей упругости подвеса и потерь на трение зависит какой процесс будет по амплитуде и по времени. Чем меньше будет время установления и амплитуда паразитных колебаний - тем лучше.
При изгибе элементов подвеса диффузора в них возникает активное сопротивление потерь, обусловленное внутренним трением, которое зависит от материала и специальных пропиток в виде вязких незасыхающих мастик, которые увеличивают потери на вязкое трение в материале пружин. Этот параметр Тиля-Смолла называется Rms сопротивление механических потерь в подвесе и выражается в Килограммах в секунду.
Если объединить массу подвижной системы с присоединенной массой среды, а также активное сопротивление потерь на трение с активной составляющей сопротивления излучения подвеса, то получится механическая подвижная система головки - последовательный колебательный контур с частотой собственного основного резонанса. С дугой стороны все это движется мотором. Тут тоже есть пара моментов на счет мотора. Звуковая катушка, движущаяся в магнитном моле тоже участвует в процессе контроля перемещения динамика. При подаче на выводы катушки электрического сигнала, в катушке возникает ток и за счет созданного магнитного поля, при взаимодействии с полем постоянного магнита магнитной системы, катушка двигается по оси, перемещая систему. Но при этом, при движении катушки в постоянном магнитном поле возникает импульс противоЭДС, и возникает сила, которая противоположна основной двигающей силе. Как только импульс прекращается- эта сила стремится удержать подвижную систему, так как катушка короткозамкнута через нулевое выходное сопротивление усилителя. Эта дополнительная сила очень важна и при мощном моторе является значительной силой контролирующей перемещение подвижной системы динамической головки. Поэтому BLI косвенно говорит о том, как мотор контролирует перемещение подвижной системы. И важно чтобы этот уровень силы был высоким. Это возможно при большой индукции в зазоре, длине проводника звуковой катушке и малых потерях во всех соединениях, проводах.
Вот теперь нужно определиться с набором параметров для динамика ОЯ.
1. Минимально возможная масса подвижной системы. Оптимально не более 40-50граммов для 12\" динамика. У военного Телефункена была 10 граммов.
2. Оптимальное соотношение показателя упругости подвеса и внутренних потерь на трение подвеса, чтобы обеспечить быстрое возвращение подвижной системы в положение покоя с минимальной амплитудой паразитных апериодических колебаний и времени переходных процессов. Но излишняя упругость и потери на трение выразятся в излишне высокой резонансной частоте и возможным потерям микродинамики на малых уровнях сигнала в области мидбаса. Вот именно этот параметр вызывает наибольшую проблему при выборе - что есть мягкий и что есть жесткий подвес и будет ли его достаточно: скажем условно Сms=0.13 мм на ньютон - это очень жесткий подвес профессионального динамика. Сms=0.86 мм на ньютон - очень мягкий подвес для компрессионного подвеса в оформление Закрытый ящик. Такому динамику нужна дополнительная пружинка в виде сжимаемого воздуха в оформлении. Иначе и амплитуда паразитных колебаний будет огромной и время установления затянутым. Показатели потерь на трение в подвесе тоже условно на основе статистики можно определить 1кг в секунду - это очень мало, 14кг в секунду уже в профессиональных перегруженных системах.
3. Для ОЯ, где все пружинки уже есть в динамике и особенно широкополосников, очень важна величина линейного хода. Об этот камень маркетинга обломались многие радиолюбители, пытаясь делать басистые системы на 6-8 дюймовых широкополосниках. Чем более глубокий бас играет динамик - тем больше должна быть величина линейного хода.
Отдельно остановимся на последнем моменте, для тех, кому это интересно.
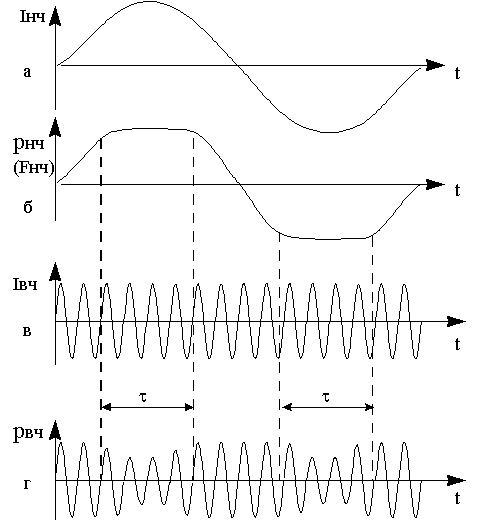 |
Если длина звуковой катушки равна глубине зазора, то при ее колебаниях часть витков будет выходить из него в зону ослабленной индукции. При этом средняя индукция магнитного поля, взаимодействующего с витками катушки, будет уменьшаться. Уменьшается при этом и электродинамическая сила F=BlI. В результате этого амплитуда смещения диффузора с катушкой уменьшится и не достигнет значения, которое имело бы место при неизменной индукции. Если ток в катушке изменяется по гармоническому закону, то при постоянной индукции электродинамическая сила, а значит и звуковое давление будет меняться по тому же закону. |
В случае же уменьшения индукции при выходе катушки из зазора произойдет изменение формы синусоиды по звуковому давлению, несмотря на то, что ток в катушке имеет форму синусоиды. а-форма тока низкочастотного сигнала в катушке;
б-форма звукового давления низкочастотного сигнала;
в-форма тока высокочастотного сигнала в катушке;
г-форма звукового давления высокочастотного сигнала;
t --время, в течение которого часть витков катушки находится вне зазора
Самое главное. Для излучения одинаковой мощности на низких частотах требуется большая амплитуда смещения катушки, чем на высоких. Поэтому из зазора катушку в основном выводит низкочастотный сигнал. Следовательно, средняя индукция магнитного поля, взаимодействующего с витками катушки, изменяется под воздействием низкочастотного сигнала.
Если по катушке пропустить одновременно токи низкой и высокой частот, то изменять среднюю индукцию будет низкочастотный сигнал. На отрезке времени t, когда часть витков находится вне зазора, из-за ослабленной индукции амплитуда высокочастотного сигнала будет уменьшена. Высокочастотный сигнал по звуковому давлению будет модулирован по амплитуде. В результате амплитудной модуляции в спектре сигнала по звуковому давлению около высокочастотной составляющей появятся две боковых частоты, хотя в исходном сигнале их не было.
Появление дополнительных составляющих, отсутствующих в спектре исходного сигнала, является причиной нелинейных искажений. Представьте себе, насколько исказится спектр акустического сигнала, если подать в катушку не две частоты, а полный спектр частот реального сигнала. Если взглянуть на даташиты современных широкополосных динамиков (да и зачастую низкочастотных), сразу становится очевидно, что ради маркетинговых требований высокой чувствительности, и малой стоимости изделия, такие динамики имеют величину линейного перемещения подвижной системы всего 1-2мм (0.5-1мм в обе стороны) что однозначно вызовет рост нелинейных искажений при попытке вытянуть глубокий бас из такого динамика. Для уменьшения этого вида нелинейных искажений длину намотки катушки делают больше глубины зазора. В этом случае изменение средней индукции при колебательном движении катушки будет значительно уменьшено. В лучших системах линейный ход может достигать 20мм.
Другой причиной появления нелинейных искажений является изменение гибкости крепления подвижной системы головки при больших амплитудах колебаний, из-за чего нарушается линейность изменения возвращающей упругой силы. Если диффузор выходит за линейный участок изменения упругой силы, то происходит ограничение акустического сигнала по максимуму и по минимуму, аналогично компрессору -лимиттеру. Лимиттер понятно, а вот компрессор слабоуровневых сигналов получается потому что по сути то, что для низкочастотного сигнала является нулевым положением для всех остальных таковой не является. Для всех остальных частот в пачке то самое перемещение низкочастотника, является динамически изменяемым нулевым положением с присущим этому положению начальным напряжением пружин и инерцией перемещения подвижной системы. Т.Е. мотор при перемещении подвижной системы самым низкочастотным сигналом, меняет это перемещение всеми остальными сигналами в пачке. При этом, вплоть до кратковременной смены направления перемещения. Поэтому рассматривать поведение динамика на стационарном синусоидальном сигнале определенной амплитуды методом скользящего синуса или импульсного шумового сигнала одной амплитуды с последующим разложением по ряду Фурье не даст никакого понятия, как динамик будет играть реальный музыкальный сигнал в пачке многочастотных, многоуровневых синусоид. Все эти измерения АЧХ дают примерное и очень грубое представление о тональном балансе АС и особо больших огрехах. И нужны зачастую в целях маркетинга. Если вспомнить, что динамический диапазон музыкального сигнала равняется минимум 60дб, то для Акустической системы сопротивлением 8 ом. и чувствительностью 90дб на ватте, дающей в комнате приемлемое звуковое давление при пике сигнала примерно 102дб и минимуме на 42дб это означает изменение уровня сигнала в пачке от 11вольт на максимальной синусоиде до !!!! 0,0035вольта = 3,5 милливольта. И это если передавать привет соседям на уровне 102дб на метре. Если слушать немного тише (на уровне 99дб : ) то мы уже подаем на катушку микровольты изменения. А теперь нетрудно представить как там микровольтами перемещать подвижную систему, особенно если подвижная система уже имеет начальную кинетическую энергию под воздействием высокоуровневого НЧ сигнала, если подвес уже натянут сильнее обычного, а подвижная система перемещается имея начальную энергию инерции массы на ускорение. Вот и компрессия низкоуровневого сигнала при больших низкочастотных перемещениях.
Вот и все требования  ... надеюсь стало легче с выбором динамических головок???
... надеюсь стало легче с выбором динамических головок???
Если еще не отпала охота в конструировании - то вернемся к теме. На рынке есть множество профессиональных динамиков с достаточно легким, жестким подвесом и мощной магнитной системой, которая обеспечивает линейное перемещение порядка 6-8мм при высокой чувствительности для 12\" динамиков с уровнем BLI больше 10 а еще лучше около 16-20.. вот такие моторы могут контролировать любые подвижки. Что же такое непонятные BLI с его непонятными теслами на метр и амперами: Этот уровень в B*L*I в 16 Тесла на метр, если перевести в более понятные величины сил.. означает 3.3 фунта на ампер. Если перевести фунты в граммы - то будет уже проще рассчитать силы мотора на малых уровнях сигнала - миллиамперах и микроамперах, силы такого мотора будет достаточно для перемещения 50 граммов подвижной системы и для преодоления сопротивления пружины в 0,6ньютон на миллиметр и потерь на трение в пружине или нет. Если нет - то динамик на данной частоте и данном уровне сигнала будет молчать. Вся информация будет теряться в потерях на преодоление чрезмерно жесткой пружины и потерь на трение или чрезмерно тяжелого диффузора и естественно его момента инерции при перемещении его низкочастотной синусоидой чем и опасны динамики с низкой чувствительностью. Если вспомнить кривую чувствительности человеческого слуха к различным частотам, то станет понятно - что самые большие проблемы с компрессированием могут возникнуть у динамика в области мидбаса от 100 до 300 герц - где и перемещения при малых уровнях должны быть значительными. В профессиональных системах, чтобы динамик долго жил на максимальных мощностях, подвес делают излишне жестким со всеми вытекающими последствиями в виде резонансной частоты в районе 60 герц или тяжелого диффузора - чтобы опустить резонансную или низкой чувствительности из за тяжелого диффузора и слабого мотора. В профессиональных системах все параметры \"преувеличены\" для достижения показателя максимально подводимая мощность, которая приводит неискушенную публику в неописуемый восторг и покупатель тянется в карман за деньгами. При этом, никто и не смотрит на параметр уровня максимально возможного развиваемого давления данным динамиком и что максимума динамик достигнет уже при 50-100 ваттах: дальше будет термокомпрессия и динамик будет работать как ТеплоЭлектроНагреватель вне зависимости от того, сколько в него ввалили киловатт или два. Для домашнего применения такие динамики нужно сильно дорабатывать, а при этом можно и испортить.
Если все же кто то дочитал все это до конца, то вот теперь можно вспомнить опыт господ Тиля и Смолла в плане Qts. Если мы нашли тот динамик, что удовлетворит нас при работе в ОЯ, то на основании параметра Qts мы можем спрогнозировать характер баса от сухого и поджатого при полной добротности около 1 и объемного (вплоть до чрезмерно затянутого) при полной добротности 0.2. в нашей новой АС. ВСЕ. В том то и штука, что показатель полной добротности Qts не показывает, насколько упругость подвеса соответствует весу подвижной системы и достаточно ли внутреннего трения пружин для их амортизации при успокоении системы и установлении в состояние покоя. А её должно быть полностью достаточно и не больше чем надо. Иначе будет компрессор. И перемещения должно быть достаточно - иначе будет лимиттер - генератор гармоник.
В своем проекте TQWP я использовал динамик НОЭМА 75ГДШ-3-3, который по показателям электрических и механических параметров после пропитки хитиновым композитом, практически полностью удовлетворяет требованиям домашнего применения в оформлении ОЯ, следовательно TQWP. Может немного излишняя упругость подвеса. Это немного зажимает микродинамику на мидбасе. TQWP не изменяет резонансной частоты подвижной системы при этом механически демпфирует подвижную систему на частоте основного механического резонанса, что снижает нелинейные искажения системы.
Таким образом, TQWP является простым и недорогим в повторении оформлением с отличным звучанием (если конечно правильно выбрать динамик, что как видно непросто) и не допустить грубых ошибок при расчетах и заполнении корпуса звукопоглощающими материалами. Кроме того, характер звучания такой АС можно очень легко и достаточно достоверно спрогнозировать и смоделировать при известных: полной добротности и АЧХ динамической головки в ЗЯ эквивалентного объема. А все остальные параметры данной АС будут определяться исходными данными динамика. Безусловно, если динамик обеспечит линейное магнитное поле и упругость подвеса в рамках подводимых обычно мощностей.
В оформлении ФИ или ЗЯ все гораздо сложнее - так как все параметры меняются в связке с ящиком и дополнительным излучателем Гельмгольца, добавляя новых свойств динамику и системе в целом. Есть и достоинства и недостатки, о которых стоит подумать более детально отдельно.
Комментарии
Здесь никто ничего не написал. Вы можете быть первым.